Yao (Mark) Mu
Assistant Professor
AI Institute, Shanghai Jiao Tong University
Obtained Ph.D. Degree of Computer Science
The University of Hong Kong
Obtained M.Phil Degree at
Tsinghua University
Home
Research
Resume
Code
Daily life
SocialContact:
AI Institute, School of Computer Science
Shanghai Jiao Tong University
800 Dongchuan Road, Minhang District, Shanghai
Postcode: 200240
Email: muyao@sjtu.edu.cn

Bio: I am a tenure-track Assistant Professor, at AI Institute, School of Computer Science in Shanghai Jiao Tong University, where I work closely with Professor Xiaokang Yang at SJTU, Prof. Ping Luo at HKU, and Professor Mingyu Ding at UNC. Previously, I received my doctoral degree of Computer Science at the University of Hong Kong, fortunately supervised by Prof. Ping Luo and co-advised by Prof. Xiaoou Tang at the MMLab@HKU. Previously I obtained the M.Phil Degree from Tsinghua University in June 2021,under the supervision of Prof. Bo Cheng and Prof. Shengbo Li at the Intelligent Driving Laboratory and Prof. Jianyu Chen at the Institute for Interdisciplinary Information Sciences in Tsinghua University.
Contact me with email: muyao@sjtu.edu.cn, Wechat:muyao20167(请备注来意) and Zhihu: 知乎.
Welcome to ScaleLab@SJTU! Website: https://scalelab-sjtu.github.io/.
有意向报名上海交通大学计算机学院博士、硕士,上海AI Lab联培博士(2026级博士招生已结束)的同学请仔细阅读 致想加入ScaleLab的同学的一封信。
实习生、硕博士生申请报名链接: 招生官方报名链接
Research Interests: Embodied AI, Generative Robot Agent, Reinforcement Learning, Roboitcs Control. My goal is to build a general embodied AI system that can learn optimal policy efficiently and can be generalized well in unseen tasks and environments. My research slogan: Shape the intelligence, Spirit the machine! (为智慧塑形,为机器注灵!)Joining My Group: I am looking for PHD student, Mater, student researchers and visiting students to join my group. Please feel free to send me an email with your resume if you are interested in doing research with me. Enjoy life, enjoy research. May the force be with you.
News: I am the primary responsible person for DeepTimber Robotics Innovations Community(深木社区->向上开花,向下扎根): A Community for Multi-modal Embodied AI and Robotics Enthusiasts, a large community of engineers and researchers who share interests in embodied AI and robotics. Please find some details about DeepTimber Robotics Innovations Community in this link and this github page.
News: Our paper "Skilldiffuser: Interpretable hierarchical planning via skill abstractions in diffusion-based task execution" is accepted by CVPR 2024!
News: Three Papers[SPET, Tree-Planner, Aligndiff] are accepted by ICLR 2024!
News: Our paper "EmbodiedGPT: Vision-Language Pre-Training via Embodied Chain of Thought" has been accepted by NeurIPS 2023 (Selected as Spotlight)!
News: Our paper "AdaptDiffuser: Diffusion Models as Adaptive Self-evolving Planners" has been accepted by ICML 2023 (Oral Presentation)!
News: Our paper "MetaDiffuser: Diffusion Model as Conditional Planner for Offline Meta-RL." has been accepted by ICML 2023!
News: Our paper "EC^2: Emergent Communication for Embodied Control." has been accepted by CVPR 2023!
News: Our paper "CO^3: Cooperative Unsupervised 3D Representation Learning for Autonomous Driving" has been accepted by ICLR 2023!
News: Our paper "EUCLID: Towards Efficient Unsupervised Reinforcement Learning with Multi-choice Dynamics Model" has been accepted by ICLR 2023!
2022-09:Our paper "DOMINO: Decomposed Mutual Information Optimization for Generalized Context in Meta-Reinforcement Learning" has been accepted by NeurIPS 2022(Spotlight)!
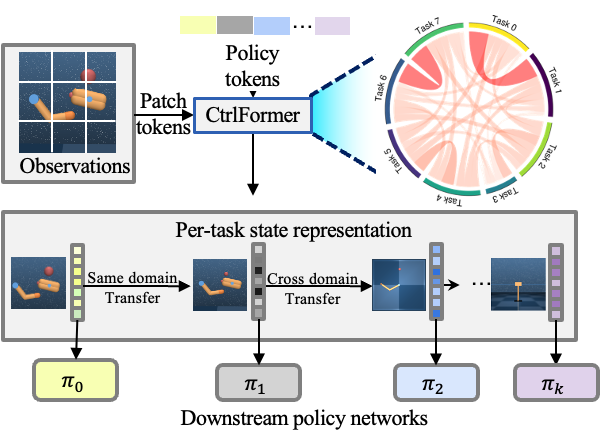
2022-03: Our paper "CtrlFormer: Learning Transferable State Representation for Visual Control via Transformer" has been accepted by ICML 2022!
Hong Kong PhD Fellowship Scheme (HKPFS)
HKU Presidential PhD Scholar Programme (HKU-PS)
Student Best Paper Award at the 20th ICCAS
Finalists for the Best Student Paper Award of IV2021 (3/450)
Outstanding Graduate of Tsinghua University (only 1 person/faculty)
Outstanding Thesis Award, Tsinghua University
National Scholarship (3 times)
Talks
Talk at RLChina:
AdaptDiffuser: Diffusion Models as Adaptive Self-evolving Planners
Talk at New Youth:
Knowledge Transfer and Generalization of Deep Reinforcement Learning
Conference on Neural Information Processing Systems(NeurIPS),International Conference on Machine Learning (ICML), IEEE/CVF Computer Vision and Pattern Recognition Conference (CVPR), AAAI Conference on Artificial Intelligence (AAAI), International Conference on Artificial Intelligence and Statistics (AISTATS), IEEE Intelligent Vehicles Symposium (IEEE IV), IEEE International Conference on Intelligent Transportation Systems (IEEE ITSC), and Journal of Automobile Engineering.
